英特爾正式發布了其創新的“具身智能大小腦融合方案”,旨在為機器人、自動化設備等智能體構建一種全新的系統架構與開發范式,以加速具身智能在現實場景中的規模化落地。該方案的核心在于通過軟件層面的深度創新,將傳統集中式“大腦”的復雜認知決策與分布式“小腦”的高效實時控制有機融合,為開發者提供了更高效、更靈活的軟件開發工具與框架。
一、 方案核心理念:解耦與協同的軟件架構
“大小腦融合”并非簡單的硬件堆疊,其精髓在于一套全新的軟件定義架構。在傳統機器人系統中,感知、決策、規劃與控制往往由一個中央處理器(大腦)串行處理,容易形成性能瓶頸,并難以應對突發、高動態的環境變化。英特爾的新方案在軟件層面進行了根本性重構:
- “大腦”(Big Brain):通常指基于云端或本地高性能計算節點的智能中心,負責處理需要大量計算資源的任務,如復雜環境理解、長期任務規劃、高級AI模型推理(如大語言模型交互)、知識庫調用等。其軟件開發側重于抽象化、算法優化和云端協同。
- “小腦”(Little Brain):通常指嵌入在設備邊緣(如機器人關節、傳感器模組內)的智能單元,由英特爾?酷睿?、凌動?或FPGA等處理器驅動,專精于毫秒級實時響應、低延遲閉環控制、本能避障、局部路徑重規劃等。其軟件開發強調確定性、低功耗和可靠性。
該方案的軟件開發套件(SDK)和中間件,旨在讓這兩個層面的軟件組件能夠高效、安全地通信與協作,實現“大腦”宏觀指揮與“小腦”微觀執行的完美協同。
二、 軟件開發的關鍵賦能工具
為了支持這一融合架構的快速開發,英特爾圍繞軟件開發提供了多層次的支持:
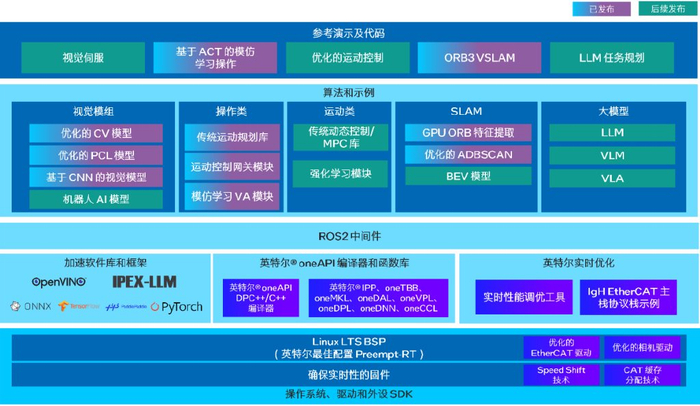
- 統一的編程模型與框架:提供跨“大腦”與“小腦”的異構計算編程抽象,降低開發者在不同硬件平臺(CPU、GPU、VPU、FPGA)上部署和優化算法的復雜度。開發人員可以用更一致的邏輯來編寫從云端策略到底層控制的代碼。
- 實時與確定性通信中間件:開發了高性能的跨層級通信協議與API,確保“大腦”的指令能夠可靠、及時地下發至“小腦”,同時“小腦”采集的海量傳感器數據也能被高效篩選和上傳,供“大腦”分析決策。這對于保障智能體在動態環境中的行為連貫性至關重要。
- “小腦”側功能容器化:將常見的實時控制功能(如運動控制、力覺反饋、安全監控)封裝成可復用、可獨立升級的軟件模塊或“微服務”。開發者可以像搭積木一樣,為不同的機器人形態快速配置和組合所需的小腦功能,極大提升了開發效率和系統靈活性。
- 仿真與數字孿生工具鏈:提供了從算法開發、系統仿真到真實部署的全流程軟件工具。開發者可以在高度逼真的虛擬環境中,對大小腦融合的完整系統進行測試和調優,大幅降低實體機器人調試的風險與成本,加快從代碼到產品的迭代速度。
- AI模型部署與優化工具:集成了OpenVINO?等工具,方便開發者將訓練好的視覺、語音、決策AI模型高效地部署和運行在從云端到邊緣的各類硬件上,實現AI能力在大小腦之間的合理分配與協同推理。
三、 構建落地新范式:從軟件開發到行業應用
英特爾此方案通過上述軟件創新,正在構建一種具身智能落地的新范式:
- 降低開發門檻:軟硬件解耦的架構和豐富的工具鏈,使得機器人廠商和開發者可以更專注于上層應用和創新功能的開發,無需深陷底層異構系統整合的泥潭。
- 提升系統魯棒性與適應性:小腦的局部自治能力使智能體在面對網絡延遲、中斷或突發狀況時,仍能保持基本的安全運行和即時反應,提高了系統的整體可靠性。
- 實現規模化靈活部署:軟件定義的架構使得同一套“大腦”算法可以適配和指揮不同形態、具備不同“小腦”配置的機器人,有利于解決方案的快速復制和定制化。
目前,該方案已在工業機械臂、物流AMR(自主移動機器人)、服務機器人等領域展開應用探索。例如,在復雜的倉儲環境中,中央調度系統(大腦)可以規劃整體貨物分揀流程,而單個搬運機器人身上的“小腦”則負責實時避障、精準取放等動作,兩者通過軟件無縫銜接,共同提升作業效率與安全性。
英特爾?具身智能大小腦融合方案的發布,標志著具身智能的發展從追求單一算法精度,進入了強調系統級工程化、軟件定義架構的新階段。其通過一系列先進的軟件開發工具與理念,為解決智能體在復雜物理世界中感知、決策、執行的協同難題提供了切實可行的路徑。隨著該方案生態的不斷完善,有望吸引更多開發者投身其中,共同推動具身智能從實驗室和有限場景,走向更加廣闊、多樣的現實世界應用,真正開啟智能機器普及的新篇章。